Project Conception
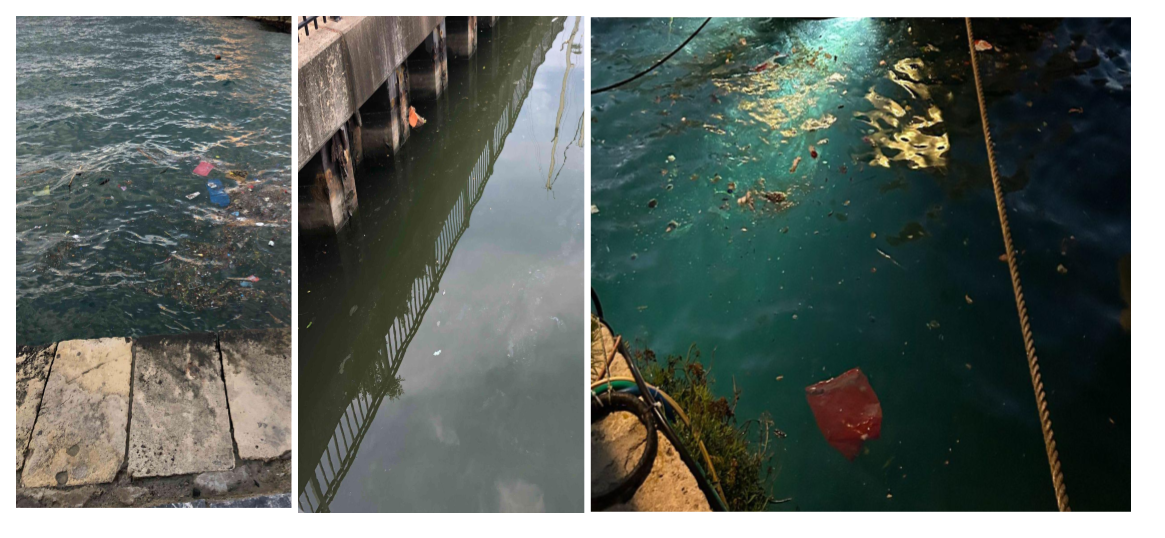
WATER2030 was conceived during the COVID-19 pandemic, addressing the challenges authorities faced in maintaining and cleaning marine environments when human resources were limited.
It was mostly driven by Diomidis' deep love for the sea and desire to preserve and restore the environment with the aid of science/engineering.
ERC Grant Proposal
Submitted as an ERC Consolidator Grant 2024 proposal to the European Research Council. Despite not securing funding, the proposal laid the groundwork for future developments.
Prototype Success
The vision inspired Ernesto Sigalas at Technical University of Crete to develop a working prototype, winning first place at POPRI EUSAIR Youth 2024:
- 🏆 Team: Ernesto Sigalas, Marios Konstantoudakis
- 🎓 Mentor: Diomidis Katzourakis
- 📰 Featured in: CNN Greece, Local Media
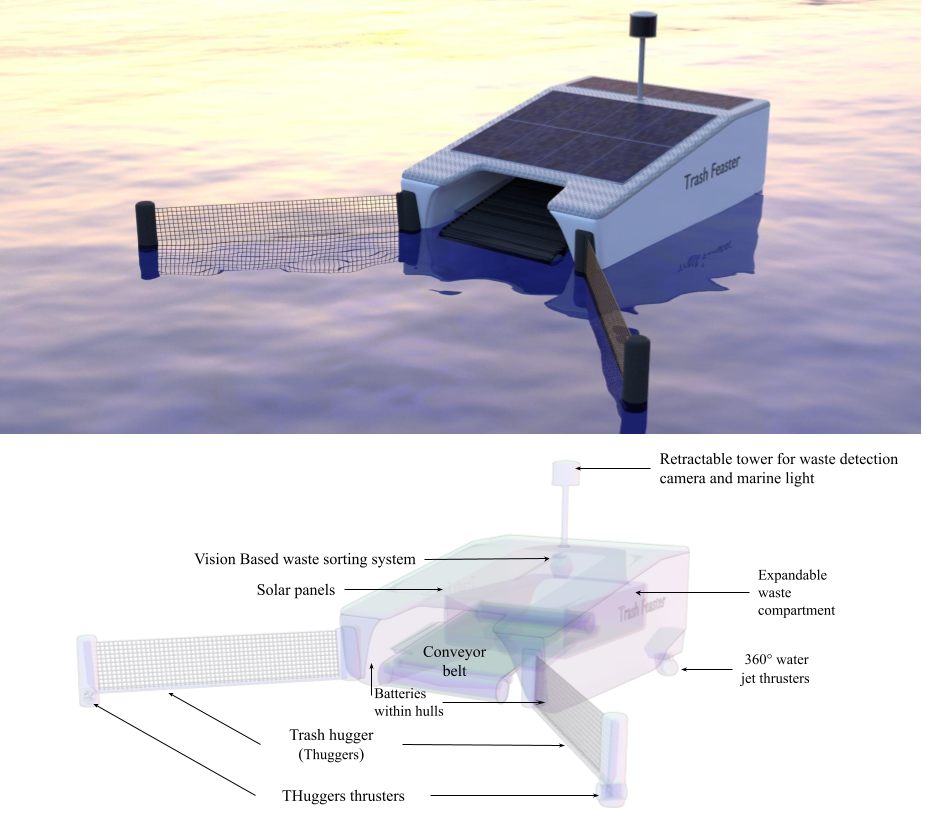
Looking Forward
WATER2030 remains a comprehensive vision for autonomous marine cleanup. While the prototype demonstrates technical feasibility, the full scope of the project - including fleet operations, advanced AI integration, and widespread deployment - awaits realization through future research and funding opportunities.